

2023-07-12
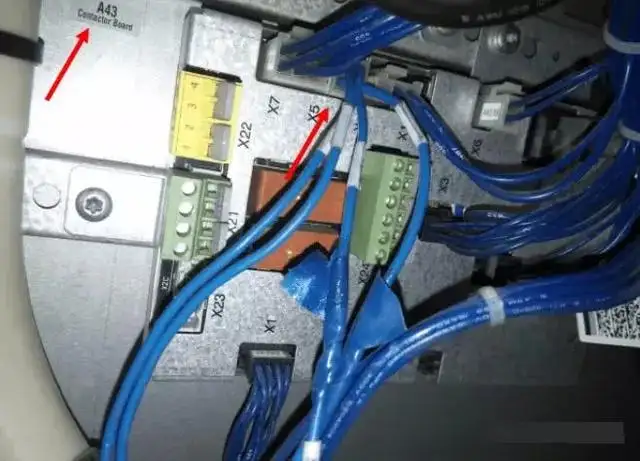
2. معالجة عطل ماس كهربائى للوحة ماس كهربائى لوحدة طاقة الروبوت ABB
العوامل البشرية: تعتبر أجهزة المبادلة الساخنة أمرًا خطيرًا للغاية ، والعديد من حالات فشل لوحات الدوائر الكهربائية ناتجة عن المبادلة الساخنة.يمكن أن يؤدي الاستخدام غير السليم للقوة عند إدخال البطاقات والمقابس بالطاقة إلى تلف الواجهات والرقائق وما إلى ذلك ، مما يؤدي إلى إتلاف لوحة دائرة الروبوت ؛مع زيادة وقت استخدام الروبوتات ، سوف تتقادم المكونات الموجودة على لوحة دائرة الروبوت بشكل طبيعي ، مما يؤدي إلى فشل لوحة دائرة الروبوت.
العوامل البيئية: بسبب الصيانة غير الصحيحة من قبل المشغل ، فإن لوحة دائرة الروبوت مغطاة بالغبار ، مما قد يتسبب في حدوث دوائر قصيرة للإشارة.
3. عندما يكون من الضروري عمل نسخة احتياطية من الروبوتات الصناعية
بعد التشغيل الأول للجهاز الجديد.
قبل إجراء أي تعديلات.
3. بعد الانتهاء من التعديلات.
4. إذا كانت الروبوتات الصناعية مهمة ، فيجب إجراؤها مرة واحدة في الأسبوع على أساس منتظم.
5. من الأفضل عمل نسخة احتياطية على محرك أقراص USB أيضًا.
6. احذف النسخ الاحتياطية القديمة بانتظام لإخلاء مساحة على القرص الصلب.
4. كيفية التعامل مع الموقف الذي يتم فيه تشغيل الروبوت وتظل قلادة التدريس تعرض الواجهة التالية
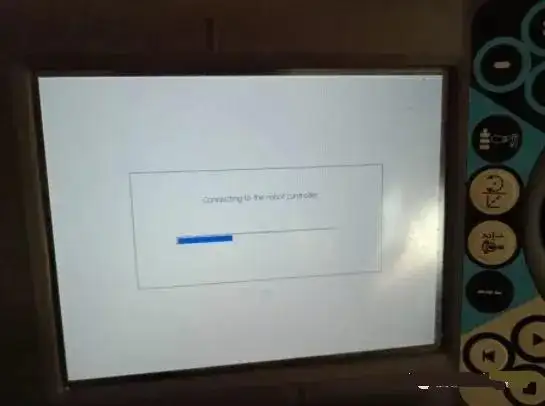 الموقف أعلاه هو عدم وجود اتصال اتصال بين قلادة التدريس ووحدة التحكم الرئيسية للروبوت ، وتشمل أسباب عدم إنشاء الاتصال:
الموقف أعلاه هو عدم وجود اتصال اتصال بين قلادة التدريس ووحدة التحكم الرئيسية للروبوت ، وتشمل أسباب عدم إنشاء الاتصال:
1. خلل في مضيف الروبوت.
2. بطاقة CF المدمجة (بطاقة SD) لمضيف الروبوت بها عيوب.
3. كبل الشبكة بين قلادة التدريس والمضيف مفكوك ، إلخ.
طريقة المعالجة: 1. تحقق مما إذا كان المضيف طبيعيًا وما إذا كانت بطاقة SD في المضيف عادية.
2. تحقق من توصيل كبل الشبكة من قلادة التدريس إلى المضيف بشكل صحيح.
5. ما معنى تذكير وقت الصيانة 10106 عندما يعرض الروبوت رسالة تنبيه؟
هذا الموقف عبارة عن تذكير بالصيانة الدورية الذكي لروبوت ABB.
6. كيف يتم التعامل مع عطل في النظام عندما يدخل الروبوت في وضع التشغيل؟
1. أعد تشغيل الروبوت مرة واحدة.
إذا لم يكن الأمر كذلك ، فتحقق من قلادة التدريس للحصول على مطالبات إنذار أكثر تفصيلاً واتخذ الإجراء المناسب.
3. إعادة التشغيل.
4. إذا كان لا يزال لا يمكن تحريره ، فجرب B بدء التشغيل.
5. إذا كان لا يزال لا يعمل ، يرجى محاولة P بدء التشغيل.
6. إذا كان لا يزال لا يعمل ، يرجى محاولة بدء التشغيل (سيؤدي هذا إلى إعادة الروبوت إلى إعدادات المصنع الخاصة به ، فكن حذرًا).
7. هل يمكن مشاركة النسخ الاحتياطي للروبوت بواسطة روبوتات متعددة؟
لا. على سبيل المثال ، يمكن استخدام النسخة الاحتياطية من الروبوت أ للروبوت أ فقط ، وليس للروبوت ب أو ج ، لأن هذا يمكن أن يتسبب في فشل النظام.
8. ما هي الملفات التي يمكن مشاركتها في النسخ الاحتياطي للروبوت؟
إذا كان هناك روبوتان من نفس الطراز والتكوين.يمكنك مشاركة برنامج RAPID وملف EIO ، ولكن بعد المشاركة ، يجب أيضًا التحقق منه قبل استخدامه بشكل طبيعي.
9. ما هو الأصل الميكانيكي للروبوتات؟أين الأصل الميكانيكي؟
كل محرك من المحركات الستة للروبوت له أصل ميكانيكي ثابت فريد.سيؤدي الضبط غير الصحيح للأصل الميكانيكي للروبوت إلى مشاكل مثل الحركة المحدودة أو غير الصحيحة للروبوت ، وعدم القدرة على السير في خط مستقيم ، وإلحاق أضرار جسيمة بالروبوت.
10. كيفية مسح إنذار مراقبة العمل للروبوت 50204؟
1. قم بتعديل معلمات مراقبة عمل الروبوت (في قائمة مراقبة عمل لوحة التحكم) لتتناسب مع الوضع الفعلي.
2. استخدم الأمر AccSet لتقليل تسارع الروبوت.
3. تقليل سرعة البيانات_ خيار التعفن.
11. كيف يتم التعامل مع إنذار "50296 ، اختلاف بيانات ذاكرة SMB" عند تشغيل الروبوت لأول مرة؟
1. حدد المعايرة من قائمة ABB الرئيسية.
2. انقر فوق ROB_ 1. ادخل إلى شاشة المعايرة وحدد ذاكرة SMB.
3. حدد "خيارات متقدمة" ، ثم أدخل وانقر فوق "مسح ذاكرة خزانة التحكم".
4. بعد الانتهاء ، انقر فوق "إغلاق" ثم انقر فوق "تحديث".
5. حدد "خزانة تحكم أو ذراع آلية ، تحديث خزانة التحكم ببيانات ذاكرة SMB".
12. كيف يمكن تخصيص سرعة حركة مسار الروبوت في برنامج RAPID؟
1. حدد بيانات البرنامج من القائمة الرئيسية لقلادة التدريس.
2. بعد العثور على نوع البيانات Speeddata ، انقر فوق جديد.
3. انقر على القيمة الأولية ، ومعاني المتغيرات الأربعة Speeddata هي: v_ TCP يمثل سرعة التشغيل الخطية للإنسان الآلي ، يمثل v_ Rot سرعة دوران الروبوت ، ويمثل v_ Leax سرعة التشغيل الخطية للمحور الخارجي ، v_ Reax يمثل سرعة دوران المحور الخارجي.إذا لم يكن هناك محور خارجي ، فلا داعي لتعديل المحورين الأخيرين.
4. يمكن استدعاء البيانات المخصصة في برنامج RAPID.
13. استكشاف الأخطاء وإصلاحها لـ 6 أخطاء شائعة في إصلاح محرك ABB Robot Servo
1. كيف يتم التعامل مع خطأ تجاوز عداد خطأ المحرك أثناء الدوران عالي السرعة؟
يحدث خطأ تجاوز عداد خطأ المحرك أثناء الدوران عالي السرعة.
الإجراء المضاد 1: تحقق مما إذا كانت أسلاك كبل طاقة المحرك وكابل التشفير صحيحة وما إذا كان الكابل تالفًا.
يحدث خطأ تجاوز عداد خطأ المحرك عند إدخال نبضة قيادة طويلة.
حدث خطأ في عداد خطأ المحرك أثناء التشغيل.
الإجراء المضاد 2: زيادة قيمة إعداد مستوى الفائض لعداد الخطأ ؛إبطاء سرعة الدوران ؛تمديد وقت التسارع والتباطؤ ؛الحمل ثقيل للغاية ، ومن الضروري اختيار محرك سعة أكبر من نقطة الصفر أو تقليل الحمل ، وتثبيت منظمات النقل مثل المخفضات لزيادة الحمل.
2. ما الذي يجب عمله إذا لم يعمل عندما يكون هناك خرج نبضي؟
قم بالإشراف على القيمة الحالية لإخراج النبضة لوحدة التحكم وما إذا كان ضوء خرج النبض يومض ، وتعرف على أن نبضة الأمر قد تم الوفاء بها ويتم إخراجها الآن بشكل طبيعي ؛
تحقق مما إذا كان كبل التحكم وكابل الطاقة وكابل التشفير من وحدة التحكم إلى برنامج التشغيل موصلين بأسلاك بشكل غير صحيح أو تالف أو في حالة اتصال سيئ ؛
تحقق مما إذا كان قد تم الآن فتح فرامل محرك المؤازرة بالفرامل ؛
قم بالإشراف على ما إذا كانت لوحة محرك المؤازرة تعترف بإدخال أوامر النبض ؛
أمر التشغيل أمر طبيعي ؛
يجب أن يختار نموذج التحكم نموذج التحكم في الاتجاه ؛
هو نوع نبض الإدخال الذي تم تعيينه بواسطة محرك المؤازرة بما يتوافق مع إعداد نبض الأمر ؛
تأكد من إيقاف محرك جانب الدوران الإيجابي ، وإشارة إيقاف محرك جانب الدوران ، وعدم إدخال إشارة إعادة تعيين عداد الخطأ ، وفصل الحمل ، وعملية عدم التحميل طبيعية.افحص النظام الميكانيكي.
3. ماذا أفعل إذا لم يكن هناك تقرير الحمل الزائد مع الحمل؟
إذا حدث ذلك عندما تكون إشارة تشغيل المؤازرة متصلة ولا ينبعث أي نبضة:
تحقق من أسلاك كبل الطاقة للمحرك المؤازر لمعرفة ما إذا كان هناك أي اتصال ضعيف أو تلف في الكابل ؛إذا كان محركًا مؤازرًا بفرامل ، فيجب تشغيل الفرامل ؛هل كسب حلقة السرعة عالية جدًا ؛هل ثابت الوقت المتكامل لمجموعة حلقة السرعة صغير جدًا.
إذا تعطل المؤازر فقط أثناء التشغيل:
هل كسب دائرة السمت مرتفعًا جدًا ؛هل سعة تحديد المواقع المحددة صغيرة جدًا ؛تحقق مما إذا كان لا يوجد دوار مغلق على عمود محرك المؤازرة واضبط الماكينة من نقطة الصفر.
4. كيف يتم التعامل مع الأصوات غير الطبيعية أو الاهتزازات أثناء العملية؟
الأسلاك المؤازرة:
استخدم كبلات الطاقة القياسية وكابلات التشفير وكابلات التحكم والكابلات للتحقق من التلف ؛تحقق مما إذا كانت هناك مصادر تداخل بالقرب من خط التحكم ، وما إذا كانت متوازية أو قريبة جدًا من كبلات التيار العالي القريبة ؛تحقق مما إذا كان هناك أي تغيير في إمكانات طرف التأريض لضمان تأريض ممتاز.
معلمات المؤازرة:
إعداد كسب المؤازرة كبير جدًا ، ويوصى بضبط معلمات المؤازرة يدويًا أو نشطًا من البداية ؛بالاعتراف بإعداد ثابت الوقت لمرشح استجابة السرعة ، بقيمة أولية تبلغ 0 ، من الممكن زيادة القيمة المحددة عن طريق الاختبار ؛إعداد نسبة التروس الإلكترونية كبير جدًا ، مما يدعو إلى استعادة إعدادات المصنع ؛الرنين بين نظام المؤازرة والنظام الميكانيكي ، واختبار وتعديل تردد مرشح الدرجة والسعة.
نظام ميكانيكي:
انحرفت أداة التوصيل التي تربط عمود المحرك ونظام المعدات ، ولم يتم إحكام ربط مسامير التثبيت ؛يمكن أن يؤدي أيضًا ضعف تعشيق البكرات أو التروس إلى تغييرات في عزم دوران الحمل.اختبار عملية عدم التحميل.إذا كانت عملية عدم التحميل طبيعية ، فتحقق مما إذا كان هناك أي خلل في جزء الترابط من النظام الميكانيكي ؛اعترف بما إذا كانت حمولة القصور الذاتي ، وعزم الدوران ، والسرعة كبيرة جدًا ، واختبر عملية عدم التحميل ، وإذا كانت عملية عدم التحميل طبيعية ، فقلل الحمل أو استبدل المحرك والمحرك بسعة أكبر.
5. كيف يتم التعامل مع التحكم في التوجيه والموضع غير الدقيق أثناء إصلاح محرك سيرفو الروبوت ABB؟
أولاً ، تقر بما إذا كانت قيمة النبض الفعلية المعلنة لوحدة التحكم متوافقة مع القيمة المتوقعة ، وإذا لم تكن كذلك ، تحقق من البرنامج وصححه ؛
قم بالإشراف على ما إذا كان عدد أوامر النبض التي يتلقاها سائق المؤازرة يطابق الرقم المعلن من قبل وحدة التحكم.إذا لم يكن كذلك ، فتحقق من كابل التحكم ؛تحقق مما إذا كان إعداد نموذج نبض أمر المؤازرة يتوافق مع إعداد وحدة التحكم ، مثل CW / CCW أو النبض + الاتجاه ؛
إعداد كسب المؤازرة كبير جدًا ، يرجى ضبط كسب المؤازرة يدويًا أو بنشاط من نقطة الصفر ؛محرك السيرفو عرضة للأخطاء المتراكمة أثناء الحركة الترددية.يوصى بتعيين إشارة أصل ميكانيكية في ظل الظروف التي تسمح بها العملية ، وإجراء عملية البحث عن الأصل قبل أن يتجاوز الخطأ النطاق المسموح به ؛النظام الميكانيكي نفسه لديه دقة منخفضة أو تنظيم نقل غير طبيعي (مثل انحراف الاقتران بين محرك سيرفو ونظام المعدات).
6. إصلاح محرك سيرفو الروبوت ABB ، عملية التحكم في الاتجاه ، تم الإبلاغ عن خطأ في السرعة الزائدة.كيف نتعامل معها؟
بمجرد توصيل إشارة تشغيل المؤازرة ، ستبدأ: تحقق مما إذا كانت أسلاك كبل طاقة المحرك المؤازر وكابل التشفير صحيحة وغير تالفة.
14. كيف تخضع الروبوتات الصناعية ABB للصيانة الروتينية؟
قبل التشغيل العادي لـ "فحص الفرامل" ، من الضروري فحص فرامل المحرك لكل محور.طريقة فحص فرامل المحرك هي كما يلي:
1. قم بتشغيل محور كل ذراع روبوتية إلى أقصى موضع تحميل لها.
2. أدر مفتاح اختيار وضع المحرك في وحدة التحكم في الروبوت إلى وضع MOTORS OFF.
3. تحقق مما إذا كان العمود في موضعه الأصلي.إذا استمر الذراع الميكانيكي في الحفاظ على موضعه بعد إيقاف تشغيل المحرك ، فهذا يشير إلى أن الفرامل في حالة جيدة.
خطر فقدان وظيفة عملية التباطؤ (250 مم / ثانية)
لا تقم بتغيير نسبة التروس أو معلمات الحركة الأخرى من الكمبيوتر أو قلادة التدريس.سيؤثر هذا على وظيفة عملية التباطؤ (250 مم / ثانية).
15. عدة نقاط يجب الانتباه إليها عند استخدام الوسائل التعليمية بأمان:
يقوم زر التمكين المثبت على قلادة التدريس ، عند الضغط عليه حتى المنتصف ، بتغيير النظام إلى وضع MOTORS ON.عند تحرير الزر أو الضغط عليه بالكامل ، يتغير النظام إلى وضع MOTORS OFF.
16- من أجل الاستخدام الآمن للوسائل التعليمية ، يجب اتباع المبادئ التالية:
1.عندما يتعذر على زر تمكين الجهاز أن يفقد وظيفته أثناء البرمجة أو تصحيح الأخطاء ، ولا يحتاج الروبوت إلى التحرك ، حرر على الفور زر تمكين الجهاز.
2. عند دخول أفراد البرمجة إلى منطقة آمنة ، يجب عليهم دائمًا حمل قلادة التدريس على أجسادهم لمنع الآخرين من تحريك الروبوت.
17. عند العمل ضمن نطاق عمل الذراع الآلية ، يجب مراعاة النقاط التالية:
1. يجب تشغيل مفتاح اختيار الوضع الموجود على وحدة التحكم إلى الوضع اليدوي من أجل تشغيل جهاز التمكين لفصل الكمبيوتر أو التشغيل عن بُعد ؛
2. عندما يكون مفتاح اختيار الوضع في وضع التشغيل
3. انتبه لمحور دوران الذراع الآلية ، وكن حذرًا عند اختلاط الشعر أو الملابس.انتبه أيضًا إلى المكونات أو المعدات الأخرى المختارة على الذراع الآلية ؛
4. افحص فرامل المحرك لكل محور.
18. لمسة الانحراف
الظاهرة 1: الموضع الذي تلمسه الأصابع لا يتطابق مع سهم الفأرة.
السبب: بعد تثبيت برنامج التشغيل ، لم تلمس قلادة التدريس عموديًا مركز موضع عين الثور أثناء المعايرة.
الحل: أعد ضبط الموضع.
ظاهرة 2: بعض المناطق لها لمسة دقيقة ، والبعض الآخر لديه انحراف في اللمس.
السبب: تتراكم كمية كبيرة من الغبار أو المقياس على أشرطة الانعكاس الصوتي حول شاشة اللمس بالموجات الصوتية السطحية ، مما يؤثر على نقل الإشارات الصوتية.
الحل: قم بتنظيف شاشة اللمس ، مع إيلاء اهتمام خاص لتنظيف خطوط انعكاس الموجة الصوتية على جميع جوانب شاشة اللمس.عند التنظيف ، افصل مصدر الطاقة الخاص ببطاقة التحكم التي تعمل باللمس.
19. تعليمة تعليمة لا تلمس أي رد
ظاهرة: عند لمس الشاشة لا تتحرك أسهم الماوس ولا يوجد تغيير في الموضع.
السبب: تتعدد أسباب هذه الظاهرة وهي كالآتي:
1. الغبار أو المقياس المتراكم على خطوط الانعكاس الصوتي حول شاشة اللمس ذات الموجة الصوتية السطحية خطيرة للغاية ، مما يتسبب في فشل شاشة اللمس في العمل ؛
2. عطل شاشة اللمس.
3. بطاقة التحكم بشاشة اللمس معطلة.
4. تعطل خط إشارة شاشة اللمس.
5. المنفذ التسلسلي لأعطال المضيف.
6. تعطل نظام تشغيل قلادة التدريس.
7. خطأ في تثبيت برنامج تشغيل شاشة اللمس.
الحل: انتبه إلى ضوء مؤشر إشارة شاشة اللمس ، والذي يومض بانتظام في ظل الظروف العادية ، مرة واحدة في الثانية تقريبًا.
عند لمس الشاشة ، تتحول قلادة التدريس إلى اللون الأسود ، وهي مشكلة معقدة.إذا تم ضبط توفير الطاقة في الإضاءة الخلفية ، فإن الشاشة السوداء أمر طبيعي ؛إذا تم تشغيل الكلمة الثانية في منطقة التحكم في النظام عن طريق الخطأ ، فستتحول الشاشة أيضًا إلى اللون الأسود.إذا تم استبعاد النقطتين الأوليين ، فقم بالتحديث إلى أحدث برنامج ثابت للمراجعة.
أرسل استفسارك إلينا مباشرة

