
مكان المنشأ:
الصين
اسم العلامة التجارية:
YOUNGYOU
إصدار الشهادات:
CE
رقم الموديل:
LT-PG3-80B-PB
اتصل بنا

LT-PG3-80B-PB ثلاثة مخلب ميكانيكي محدد المركز بدقة متكررة 0.01
الوظائف الرئيسية للمستجيب النهائي البشري
إن مؤثر نهاية الروبوت هو مصطلح متخصص في صناعة الروبوتات ، وقد يكون من الصعب على العديد من المستخدمين الذين ليسوا على دراية بصناعة الروبوتات فهمه.ببساطة ، يشير المستجيب النهائي إلى جزء الروبوت الذي يمسك ويعمل ، وهو ما يعادل الأيدي والأصابع البشرية.تتمثل الوظيفة الرئيسية لهذا المكون في الاستيلاء على قطع العمل وأداء مهام العمل المختلفة ذات الصلة ، وهو مكون رئيسي مهم للغاية في منتجات الروبوت.
الأنواع الرئيسية لمؤثرات نهاية الروبوت
في الوقت الحاضر ، وفقًا لاحتياجات المؤسسات المختلفة ، طورت WOMMER Worm أشكالًا ووظائف مختلفة لمستجيبات نهاية الروبوت ، بما في ذلك مشغلات القابض المتوازية بإصبعين وثلاثة مشغلات القابض المتوازية.بالإضافة إلى ذلك ، من أجل تمكين الروبوت من التعامل بشكل أفضل مع قطع العمل الكبيرة ، هناك أيضًا مؤثرات نهائية تستخدم الطاقة الهوائية كمصدر للطاقة لتوفير طاقة حركية أكبر للروبوت ،
مؤثرات نهاية الروبوت هي محور بحث وتطوير منتجات الروبوت.حاليًا ، طورت شركات إنتاج الروبوتات مثل WOMMER Worm مؤثرات نهائية ذات وظائف وخصائص مختلفة ، وقدمت أداء عمل ممتازًا للمؤسسات في الاستخدام العملي.
![]()
عن الشركة
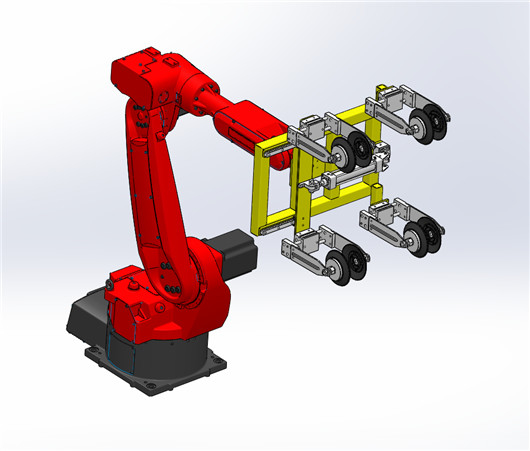
لقد تعاونت سكة التوجيه الخاصة بنا مع العديد من العلامات التجارية للروبوتات المشهورة عالميًا ، مثلABB KUKA FANUC Yaskawa UR.تشمل الشركات المشاركة بشكل أساسي منصات التحميل والتحميل والتفريغ.يتراوح حمولة سكة التوجيه من500 كجم إلى 5000 كجم.يتم تخصيص طول سكة التوجيه وفقًا لاحتياجات العملاء.لقد توصلنا إلى أن روبوت ABB IRB6700 يتوافق مع 20 آلة CNC ، وسكة توجيه بطول 50 مترًا تكمل الحركة الترددية ، وتحميل وتفريغ الروبوت.يتم تقليل عدد الروبوتات بشكل كبير ويتم توفير تكلفة التكامل.
تقدم شركتنا أيضًا روبوتات صناعية بأسعار مواتية للغاية لتقديم الطلبات معًا بأسعار منخفضة.
مرحبًا بكم في شنغهاي ، الصين ، لاستكشاف الروبوتات والقضبان!
توريد منتجات الشركة
روبوت ABB
روبوت كوكا
روبوت ياسكاوا
روبوت فانوك
روبوت UR
كوبوت
دليل السكك الحديدية
كوبوت صنع في الصين
مواصفات المنتج
| نموذج | LT-PG2-80B-PB |
| ضربة إصبع واحدة (مم) | 4 |
| الحد الأدنى من القوة القابضة (N) | / |
| قوة الإغلاق (N) | 3780 |
| زانج كايلي (ن) | 4120 |
| وزن الشغل المقترح (كجم) ① | 18.9 |
| الوزن الذاتي (كجم) | 1.1 |
| الحد الأدنى لضغط الهواء (Mpa) | 0.4 |
| ضغط الهواء المقدر (Mpa) | 0.6 |
| أقصى ضغط هواء (Mpa) | 0.6 |
| مستوى الحماية (IP) | IP40 |
| فتح / إغلاق الوقت (ق) | 0.1 / 0.1 |
| دقة التكرار (مم) | 0.01 |
| استهلاك الغاز (سم 3) (ثنائي الاتجاه) | 120 |
| أقصى طول للإصبع (مم) | 80 |
| أقصى وزن للأصابع (كجم) | 0.6 |
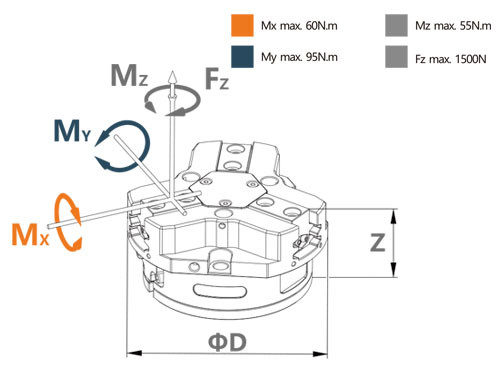
| عزم الدوران Mx (N · m) | 60 |
| لحظة بلدي (N · م) | 95 |
| لحظة Mz (N · m) | 55 |
| القوة المحورية القصوى Fz (N) | 1500 |
جدول معلمات المنتج
![]()
![]()
![]()
التعبئة والتغليف والنقل
![]()
![]()
أرسل استفسارك إلينا مباشرة

