
مكان المنشأ:
الصين
اسم العلامة التجارية:
YOUNGYOU
إصدار الشهادات:
CE
رقم الموديل:
PY4030U-050
اتصل بنا
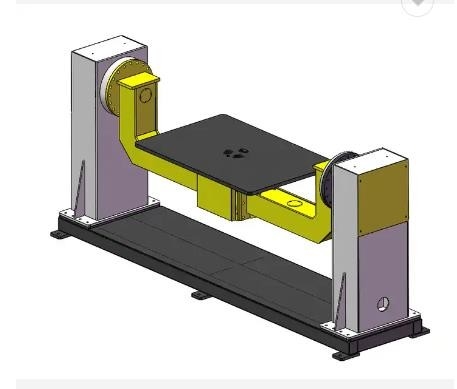




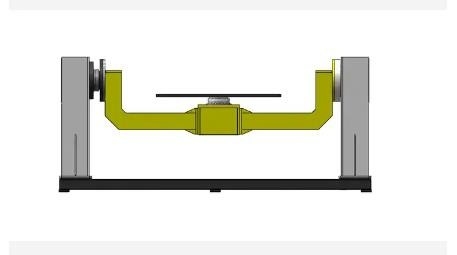
صنع في الصين 1200 * 1200 القرص الدوار 380 فولت 50-60 هرتز تحميل المحور 100-1000 كجم ميضعة اللحام ثنائي المحور
تقنية الملاحة بالانعكاس الضوئي وتحديد المواقع للروبوتات المتنقلة
تستخدم طريقة تحديد موقع الملاحة بانعكاس الضوء النموذجية بشكل أساسي مستشعرات الليزر أو الأشعة تحت الحمراء للمدى.يستخدم كل من الليزر والأشعة تحت الحمراء تقنية انعكاس الضوء للملاحة وتحديد المواقع.
يتكون نظام تحديد المواقع العالمي بالليزر بشكل عام من آلية دوران بالليزر ، وعاكس ، وجهاز استقبال إلكتروني ضوئي ، وجهاز الحصول على البيانات ونقلها.
أثناء التشغيل ، ينبعث الليزر للخارج من خلال آلية مرآة دوارة.عند مسح معلم تعاوني يتكون من عاكس خلفي ، تتم معالجة الضوء المنعكس بواسطة جهاز استقبال كهروضوئي كإشارة كشف.يبدأ برنامج الحصول على البيانات في قراءة بيانات قرص الكود لآلية الدوران (قيمة الزاوية المقاسة للهدف) ، ثم يتم نقلها إلى الكمبيوتر العلوي لمعالجة البيانات من خلال الاتصال.استنادًا إلى الموقع المعروف للمعلم والمعلومات المكتشفة ، يمكن حساب الموضع الحالي واتجاه المستشعر في نظام إحداثيات المعالم لتحقيق مزيد من التنقل وتحديد المواقع.
يتميز النطاق بالليزر بمزايا الحزمة الضيقة ، والتوازي الجيد ، والتشتت الصغير ، والدقة العالية في اتجاه النطاق ، ولكنه يتأثر أيضًا بشكل كبير بالعوامل البيئية.لذلك ، فإن كيفية إزالة التشويش من الإشارة المجمعة عند استخدام نطاق الليزر يمثل أيضًا تحديًا كبيرًا.بالإضافة إلى ذلك ، فإن نطاق الليزر يحتوي أيضًا على نقاط عمياء ، مما يجعل من الصعب تحقيق التنقل وتحديد المواقع فقط عن طريق الليزر.في التطبيقات الصناعية ، بشكل عام ، لا يزال يستخدم على نطاق واسع في الاختبار الصناعي في الموقع ضمن نطاق معين ، مثل اكتشاف شقوق خطوط الأنابيب.
غالبًا ما تستخدم تقنية الاستشعار بالأشعة تحت الحمراء في أنظمة تجنب عقبات الروبوت متعددة الوصلات لتشكيل مساحة كبيرة من "الجلد الحساس" للروبوت الذي يغطي سطح ذراع الروبوت ويمكنه اكتشاف الأشياء المختلفة التي تصادفها ذراع الروبوت أثناء التشغيل.
يشتمل مستشعر الأشعة تحت الحمراء النموذجي على الصمام الثنائي الباعث للضوء في الحالة الصلبة والذي يمكن أن ينبعث منه ضوء الأشعة تحت الحمراء والصمام الثنائي الحساس للضوء في الحالة الصلبة والذي يعمل كجهاز استقبال.تنبعث الإشارة المعدلة من أنبوب انبعاث ضوء الأشعة تحت الحمراء ، ويستقبل الأنبوب الحساس للأشعة تحت الحمراء الإشارة المعدلة بالأشعة تحت الحمراء المنعكسة عن الهدف.يتم ضمان القضاء على تداخل الأشعة تحت الحمراء البيئية عن طريق تعديل الإشارة ومرشح الأشعة تحت الحمراء المخصص.إذا كانت إشارة الخرج Vo تمثل ناتج الجهد لشدة الضوء المنعكس ، فإن Vo هي دالة للمسافة بين المسبار وقطعة العمل: Vo = f (x ، p) ، حيث p هو معامل الانعكاس لقطعة الشغل.ترتبط P بلون السطح وخشونة الكائن المستهدف.X - المسافة بين المسبار وقطعة الشغل.
عندما تكون قطعة العمل هدفًا من نفس النوع بنفس القيمة p ، فإن x و Vo يتوافقان من واحد إلى واحد.يمكن الحصول على X عن طريق استيفاء البيانات التجريبية لقياسات القرب للعديد من الكائنات المستهدفة.بهذه الطريقة ، يمكن قياس المسافة بين الروبوت والجسم المستهدف باستخدام مستشعرات الأشعة تحت الحمراء ، ويمكن أيضًا استخدام طرق معالجة المعلومات الأخرى للتنقل وتحديد موقع الروبوت المتحرك.
على الرغم من أن تحديد المواقع بالأشعة تحت الحمراء له أيضًا مزايا مثل الحساسية العالية والهيكل البسيط والتكلفة المنخفضة ، نظرًا لدقة الزاوية العالية ودقة المسافة المنخفضة ، إلا أنها تُستخدم عادةً كمستشعرات تقارب في الروبوتات المتنقلة لاكتشاف عوائق الحركة المفاجئة أو الاقتراب ، مما يسهل حالات الطوارئ وقف الروبوتات.
![]()
عن الشركة
لقد تعاونت سكة التوجيه الخاصة بنا مع العديد من العلامات التجارية للروبوتات المشهورة عالميًا ، مثلABB KUKA FANUC Yaskawa UR.تشمل الشركات المشاركة بشكل أساسي منصات التحميل والتحميل والتفريغ.يتراوح حمولة سكة التوجيه من500 كجم إلى 5000 كجم.يتم تخصيص طول سكة التوجيه وفقًا لاحتياجات العملاء.لقد توصلنا إلى أن روبوت ABB IRB6700 يتوافق مع 20 آلة CNC ، وسكة توجيه بطول 50 مترًا تكمل الحركة الترددية ، وتحميل وتفريغ الروبوت.يتم تقليل عدد الروبوتات بشكل كبير ويتم توفير تكلفة التكامل.
تقدم شركتنا أيضًا روبوتات صناعية بأسعار مواتية للغاية لتقديم الطلبات معًا بأسعار منخفضة.
مرحبًا بكم في شنغهاي ، الصين ، لاستكشاف الروبوتات والقضبان!
توريد منتجات الشركة
روبوت ABB
روبوت كوكا
روبوت ياسكاوا
روبوت فانوك
روبوت UR
كوبوت
دليل السكك الحديدية
كوبوت صنع في الصين
مواصفات المنتج
جدول معلمات المنتج

التعبئة والتغليف والنقل
![]()
![]()
أرسل استفسارك إلينا مباشرة





